Education
Doctors of Philosophy Computer Engineering (Wayne State University)
December 2013
Major: Computer Engineering. Minor: Machine Learning/Data Mining.
GPA:3.94/4.0
Extension of traditional learning methods for supervised transfer learning, rare and imbalanced data learning, multi-task clustering, self-taught learning and alternative clustering. Methods include Boosting, SVMs, low rank matrix factorization, sparse methods and kernel alignment.
Masters of Science Computer Engineering (University of Michigan-Dearborn) April 2004
Driver’s pose estimation using artificial neural networks.
Bachelor of Science Electrical Engineering (University of Michigan-Dearborn) August 2000
Laser triangulation system for 3-dimensional scanning.
December 2013
Major: Computer Engineering. Minor: Machine Learning/Data Mining.
GPA:3.94/4.0
Extension of traditional learning methods for supervised transfer learning, rare and imbalanced data learning, multi-task clustering, self-taught learning and alternative clustering. Methods include Boosting, SVMs, low rank matrix factorization, sparse methods and kernel alignment.
Masters of Science Computer Engineering (University of Michigan-Dearborn) April 2004
Driver’s pose estimation using artificial neural networks.
Bachelor of Science Electrical Engineering (University of Michigan-Dearborn) August 2000
Laser triangulation system for 3-dimensional scanning.
Publications
Machine Learning/Data Mining
- Samir Al-Stouhi and Chandan K. Reddy. 2016. Transfer learning for class imbalance problems with inadequate data. Knowl. Inf. Syst. 48, 1 (July 2016), 201-228.
- Samir Al-Stouhi and Chandan K. Reddy, “Multi-Task Clustering using Constrained Symmetric Non-Negative Matrix Factorization”, In Proceedings of the the 14th SIAM International Conference on Data Mining, (SDM), Philadelphia, USA, 2014 (pdf) (code)
- Samir Al-Stouhi and Abhilash Pandya, “Over-Sampling from an Auxiliary Domain”, In Proceedings of the 19th International Conference on Neural Information Processing, (ICONIP), Doha, Qatar, November 2012.
- Samir Al-Stouhi, Chandan K. Reddy and David E. Lanfear, Label Space Transfer Learning”, In Proceedings of the 24th IEEE International Conference on Tools with Artificial Intelligence (ICTAI), Athens, Greece, November 2012.
- Samir Al-Stouhi and Chandan K. Reddy, “Adaptive Boosting for Transfer Learning using Dynamic Updates”, In Proceedings of the European Conference on Machine Learning and Principles and Practice of Knowledge Discovery in Databases (ECML/PKDD), Athens, Greece, September 2011.(pdf)
- Samir Al-Stouhi, Radovan Miucic, "Absolute Localization via DSRC Signal Strength", " 2016 IEEE 80th Vehicular Technology Conference (VTC2016-Fall), Montréal, Canada, 2016 (pdf)
- Xinzhou Wu, Radovan Miucic, Sichao Yang, Samir Al-Stouhi, James Misener, Sue Bai, Wai-hoi Chan, "Cars Talk to Phones: A DSRC Based Vehicle-Pedestrian Safety System," 2014 IEEE 80th Vehicular Technology Conference (VTC2014-Fall), Vancouver, BC, 2014, pp. 1-7.
- Samir Al-Stouhi, “Adaptive Intersection Mapping”, In the 16th World Congress on Intelligent Transport Systems (ITSwc'2009), Stockholm, Sweden.
Oshida, K., Bai, S., Saigusa, S., Sugimoto, Y. and Al-stouhi, S., HONDA MOTOR CO., LTD., 2016. VEHICLE OPERATION ASSISTANCE. U.S. Patent 20,160,071,4
Qualifications
Machine Learning: Published in top machine learning and artificial intelligence venues with emphasis on transfer learning, imbalanced data classification, mining with rarity and multi-task learning.
Digital Signal Processing: Designed scalable architectures for signal processing and developed fixed-point DSP algorithms with C and assembly languages for high speed signal processing.
Embedded Algorithm Development: Developed several technology demonstrators and completed several software development cycles in a process-oriented environment for a wide range of platforms.
Leadership: Led multiple local and international (India, Germany and Canada) teams for a variety of applications ranging from advanced research to production oriented products.
Digital Signal Processing: Designed scalable architectures for signal processing and developed fixed-point DSP algorithms with C and assembly languages for high speed signal processing.
Embedded Algorithm Development: Developed several technology demonstrators and completed several software development cycles in a process-oriented environment for a wide range of platforms.
Leadership: Led multiple local and international (India, Germany and Canada) teams for a variety of applications ranging from advanced research to production oriented products.
Professional Experience
2017-Present Great Wall Motors Farmington Hills, MI
Artificial Intelligence Manager, Autonomous Driving Systems
As an AI Manager with Great Wall Motors, I devise proprietary real-time AI algorithms for Level IV autonomous driving. I utilize standard 2D CNN detectors and proprietary single-shot detectors to create AI algorithms for ‘Traffic Light’ detection, localization, matching, tracking, annotation, and calibration.
The following is the highlight of the values I’ve brought during this tenure:
▪ Directed and controlled functions associated with the development of multi-task 2D/3D image-based classifiers with multi-lane semantic segmentation and blinker identification within real-time requirements.
▪ Supervised the development process of 3D Lidar super-resolution, detection, tracking and prediction.
▪ Administrated the investigation of next-generation efficient NAS architectures and Bayesian detectors.
▪ Conducted the development of cloud-based reinforcement learning environment for Carla simulator.
2013-2017 Honda Research and Development Southfield, MI
Lead Research Engineer
Within this role, I spearheaded all aspects of the process from idea inception to algorithm delivery, report, and analysis. I successfully managed a research team with CMU’s National Robotics Engineering Center for developing multi-vehicle “Connected Automated” localization/detection/fusion/planning.
The following are the projects I’ve worked on during this tenure:
✅ Co-operative Sensing
▪ Handled the formation of unique value concepts for multi-vehicle CAV applications and commanded the development of a full sensor suite CAV research vehicle.
▪ Designed simulation algorithms to scale co-operative applications and quantify performance.
▪ Held accountability for embedding and analyzing deep learning methods for detection, segmentation, fusion, and tracking.
✅✅ Real-Time (ROS-based) Visual-Inertial Odometry
▪ Conducted research on the monocular VO algorithm that was top-ranked on KITTI
▪ Studied VO error metrics and performance related to vehicle tracking and localization in different urban and deep urban environments.
▪ Developed algorithms and performed analysis for real-time Visual-Inertial Odometry
✅✅✅ Connected Localization
▪ Investigated UWB and LiFi for localization and evaluated startups and suppliers for localization.
▪ Wrote algorithms to use wireless sensors for localization including lane discovery with Absorbing Markov Chains and signal strength localization with weighted-least square and Kalman Tracking.
2010-2013 Wayne State University Detroit, MI
Graduate Research Assistant
Data Mining and Knowledge Discovery Lab (Website)
- Course work includes Machine Learning, Artificial Intelligence, Data Mining and Computer Vision.
Computer-Assisted Robot-Enhanced Systems Lab (Website)
- Lead development of an Optical Spectroscopy probe for breast cancer diagnosis. (Website)
- Assist in the development of Raman Spectroscopy analysis software for cancer detection. (Website)
As an AI Manager with Great Wall Motors, I devise proprietary real-time AI algorithms for Level IV autonomous driving. I utilize standard 2D CNN detectors and proprietary single-shot detectors to create AI algorithms for ‘Traffic Light’ detection, localization, matching, tracking, annotation, and calibration.
The following is the highlight of the values I’ve brought during this tenure:
▪ Directed and controlled functions associated with the development of multi-task 2D/3D image-based classifiers with multi-lane semantic segmentation and blinker identification within real-time requirements.
▪ Supervised the development process of 3D Lidar super-resolution, detection, tracking and prediction.
▪ Administrated the investigation of next-generation efficient NAS architectures and Bayesian detectors.
▪ Conducted the development of cloud-based reinforcement learning environment for Carla simulator.
2013-2017 Honda Research and Development Southfield, MI
Lead Research Engineer
Within this role, I spearheaded all aspects of the process from idea inception to algorithm delivery, report, and analysis. I successfully managed a research team with CMU’s National Robotics Engineering Center for developing multi-vehicle “Connected Automated” localization/detection/fusion/planning.
The following are the projects I’ve worked on during this tenure:
✅ Co-operative Sensing
▪ Handled the formation of unique value concepts for multi-vehicle CAV applications and commanded the development of a full sensor suite CAV research vehicle.
▪ Designed simulation algorithms to scale co-operative applications and quantify performance.
▪ Held accountability for embedding and analyzing deep learning methods for detection, segmentation, fusion, and tracking.
✅✅ Real-Time (ROS-based) Visual-Inertial Odometry
▪ Conducted research on the monocular VO algorithm that was top-ranked on KITTI
▪ Studied VO error metrics and performance related to vehicle tracking and localization in different urban and deep urban environments.
▪ Developed algorithms and performed analysis for real-time Visual-Inertial Odometry
✅✅✅ Connected Localization
▪ Investigated UWB and LiFi for localization and evaluated startups and suppliers for localization.
▪ Wrote algorithms to use wireless sensors for localization including lane discovery with Absorbing Markov Chains and signal strength localization with weighted-least square and Kalman Tracking.
2010-2013 Wayne State University Detroit, MI
Graduate Research Assistant
Data Mining and Knowledge Discovery Lab (Website)
- Course work includes Machine Learning, Artificial Intelligence, Data Mining and Computer Vision.
Computer-Assisted Robot-Enhanced Systems Lab (Website)
- Lead development of an Optical Spectroscopy probe for breast cancer diagnosis. (Website)
- Assist in the development of Raman Spectroscopy analysis software for cancer detection. (Website)
2007-2010 Kostal Of America Troy, MI
|
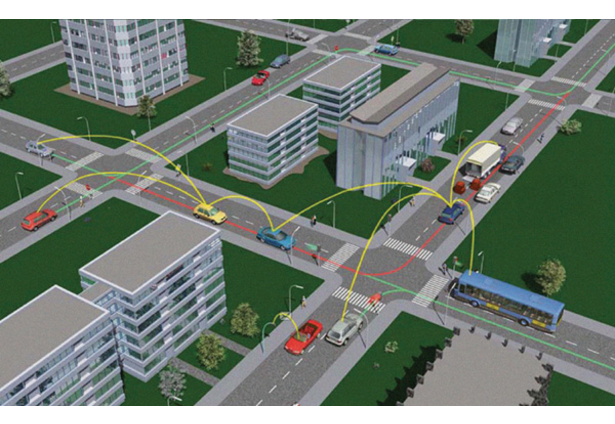
Lead development of “Vehicle to Vehicle (V2V)” and “Vehicle to Infrastructure (V2I)” demonstration vehicles for the 15th World Congress on Intelligent Transport Systems in New York.
Development of embedded hardware integrating differential GPS with 802.11p (WAVE) wireless transceivers for “Out of Sight” V2V and V2I communication and display. |
|

|
Lead Research Engineer (Camera-based driver assistance) - Research forward looking vision algorithms for headlight detection and tracking. - Research lens configurations and perform competitive studies on different tracking technologies. |

|
2000-2007 Visteon Corporation Van Buren, MI
|
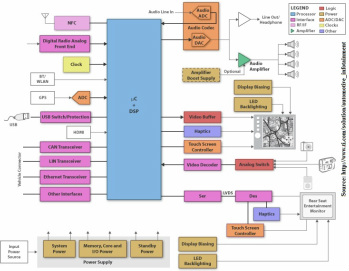
DSP Platform Architect
- Lead DSP architecture development for dual core platforms that can perform audio/video decoding, noise/echo cancellation and synthetic audio playback. - Define configurable/scalable signal processing architectures. - Perform MIPS estimation; analyze code and buffer requirements and research sampling strategies. - Provide effort, timing and cost estimates. Research suppliers and cost efficient implementations. - Mentor and manage a team of local and offshore DSP developers. |
|
DSP Lead Engineer
- Support the development of a compressed audio player with the industry’s smallest buffer space.
- Develop firmware for audio decoding (MP3, WMA, AAC) using TI C64XX/C55XX DSP series.
- Develop audio mixing and equalization algorithms for audio equalization and mixing.
- Assist in the development of a DSP equalization tool.
Software Engineer
- Develop demo software demonstrating industry’s first “In Band Off Channel” product enabling High Definition digital audio. (TI-Site) (IBOC-Site)(EE-Times)
- Implement a “Virtual Tuner Radio” to help design and test tuners with EQ controls and a smart DAC search algorithm for signal fine-tuning.
- Develop the hardware and software for a prototype remote AM/FM glass tuner. Improved tuner performance was achieved by decoding the signal at the antenna source.
- Design the hardware and software for a prototype audio gateway as a technology demonstrator.
- Develop the hardware and software for a passive emulator with a differential audio input as a prototype for a vehicle’s interface to a portable audio player.
1999-2000 DaimlerChrysler Corporation Detroit, MI
Electronics Design Engineer (Occupant Sensing and Airbags)
1998-1999 Automotive Systems Laboratory Farmington Hills, MI
Electronics Engineering Intern (Occupant Sensing and Airbags)
- Support the development of a compressed audio player with the industry’s smallest buffer space.
- Develop firmware for audio decoding (MP3, WMA, AAC) using TI C64XX/C55XX DSP series.
- Develop audio mixing and equalization algorithms for audio equalization and mixing.
- Assist in the development of a DSP equalization tool.
Software Engineer
- Develop demo software demonstrating industry’s first “In Band Off Channel” product enabling High Definition digital audio. (TI-Site) (IBOC-Site)(EE-Times)
- Implement a “Virtual Tuner Radio” to help design and test tuners with EQ controls and a smart DAC search algorithm for signal fine-tuning.
- Develop the hardware and software for a prototype remote AM/FM glass tuner. Improved tuner performance was achieved by decoding the signal at the antenna source.
- Design the hardware and software for a prototype audio gateway as a technology demonstrator.
- Develop the hardware and software for a passive emulator with a differential audio input as a prototype for a vehicle’s interface to a portable audio player.
1999-2000 DaimlerChrysler Corporation Detroit, MI
Electronics Design Engineer (Occupant Sensing and Airbags)
1998-1999 Automotive Systems Laboratory Farmington Hills, MI
Electronics Engineering Intern (Occupant Sensing and Airbags)
